Competitive Dynamics: Practicals#
This section contains practicals based on the Competitive Dynamics chapter.
# Imports
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import solve_ivp
from numpy.linalg import eigvals
Note
Model convention used here
The practical writes the LV competition model as:
The corresponding isoclines (nullclines) are:
This is equivalent to the more common scaled form \(\dot N_1=r_1N_1\bigl(1-(N_1+aN_2)/k_1\bigr)\) etc., up to a rescaling; the practical uses the unscaled form above.
Utility: LV model, isoclines, equilibria, Jacobian#
We will reuse these functions across problems (2‑1) and (2‑2).
def lv_rhs(t, y, r1, r2, k1, k2, a, b):
n1, n2 = y
dn1 = r1*n1*(k1 - n1 - a*n2)
dn2 = r2*n2*(k2 - b*n1 - n2)
return [dn1, dn2]
def isoclines(n1_grid, k1, k2, a, b):
n2_iso1 = (k1 - n1_grid)/a
n2_iso2 = k2 - b*n1_grid
return n2_iso1, n2_iso2
def equilibria(k1, k2, a, b):
# Four candidate equilibria (some may be infeasible)
E00 = (0.0, 0.0)
E10 = (k1, 0.0)
E01 = (0.0, k2)
denom = 1 - a*b
if abs(denom) < 1e-12:
Eco = (np.nan, np.nan)
else:
n1_star = (k1 - a*k2)/denom
n2_star = (k2 - b*k1)/denom
Eco = (n1_star, n2_star)
return [E00, E10, E01, Eco]
def jacobian(n1, n2, r1, r2, k1, k2, a, b):
# f1 = r1*n1*(k1 - n1 - a*n2)
# f2 = r2*n2*(k2 - b*n1 - n2)
df1_dn1 = r1*(k1 - n1 - a*n2) + r1*n1*(-1)
df1_dn2 = r1*n1*(-a)
df2_dn1 = r2*n2*(-b)
df2_dn2 = r2*(k2 - b*n1 - n2) + r2*n2*(-1)
return np.array([[df1_dn1, df1_dn2],
[df2_dn1, df2_dn2]])
def stability_at(eq, r1, r2, k1, k2, a, b):
J = jacobian(eq[0], eq[1], r1, r2, k1, k2, a, b)
ev = eigvals(J)
stable = np.all(np.real(ev) < 0)
feasible = (eq[0] >= -1e-9) and (eq[1] >= -1e-9)
return ev, stable, feasible
def add_vector_field(ax, rhs, xlim, ylim, args=(), density=21, normalize=True, mask_fn=None, color='0.6', alpha=0.35):
"""Add a light vector field (quiver) to a 2D phase-plane axis.
mask_fn(x, y) -> bool can be used to restrict arrows (e.g., simplex constraints).
"""
xs = np.linspace(xlim[0], xlim[1], density)
ys = np.linspace(ylim[0], ylim[1], density)
X, Y = np.meshgrid(xs, ys)
U = np.zeros_like(X, dtype=float)
V = np.zeros_like(Y, dtype=float)
for i in range(X.shape[0]):
for j in range(X.shape[1]):
x = float(X[i, j])
y = float(Y[i, j])
if mask_fn is not None and not mask_fn(x, y):
U[i, j] = 0.0
V[i, j] = 0.0
continue
u, v = rhs(0.0, [x, y], *args)
U[i, j] = u
V[i, j] = v
if normalize:
M = np.hypot(U, V)
M[M == 0] = 1.0
U = U / M
V = V / M
ax.quiver(
X,
Y,
U,
V,
color=color,
alpha=alpha,
angles='xy',
scale_units='xy',
scale=25,
width=0.0025,
headwidth=3,
headlength=4,
pivot='mid',
zorder=0,
)
(2‑1) Investigate the phase portrait of the Lotka–Volterra competition model#
The 2‑species Lotka–Volterra competition model is given by
Note
See also (theory notebook: competitive-dynamics.ipynb):
Lotka–Volterra Competition: geometry in the phase plane → Model and isoclines
Lotka–Volterra Competition: geometry in the phase plane → Four canonical outcomes
Implement the Lotka–Volterra competition model in Python to investigate its dynamical behaviour.
Parameter set A (coexistence case)#
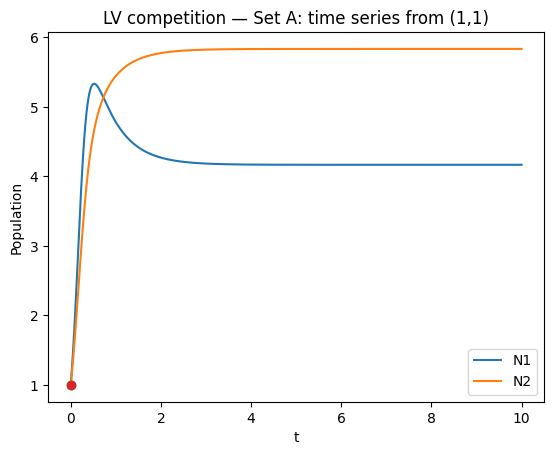
Use parameters \(k_1=10\), \(k_2=7.5\), \(\alpha=1\), \(\beta=0.4\), \(r_1=1\), \(r_2=1\).
Use initial conditions \(N_1(0)=1\), \(N_2(0)=1\) and plot the solutions against time. Mark the initial conditions with a dot (or other marker).
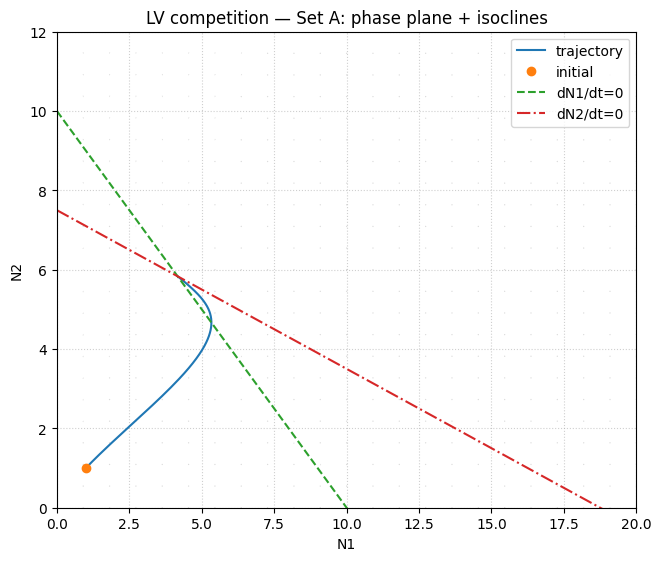
Plot the solutions in the phase plane. As an indication choose your \(N_1\) axis from \(0\) to \(20\) and the \(N_2\) axis from \(0\) to \(12\).
The isoclines are given by the curves
Plot the isoclines together with the solution.
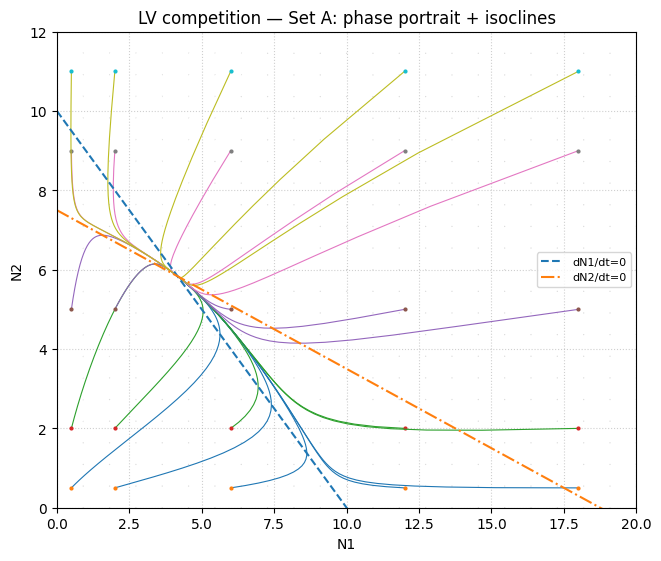
Plot the phase portrait: plot solutions for a variety of different initial conditions simultaneously in the phase plane, and also plot the isoclines.
After you have done all this, save your work.
Parameter set B (alternative stable states case)#
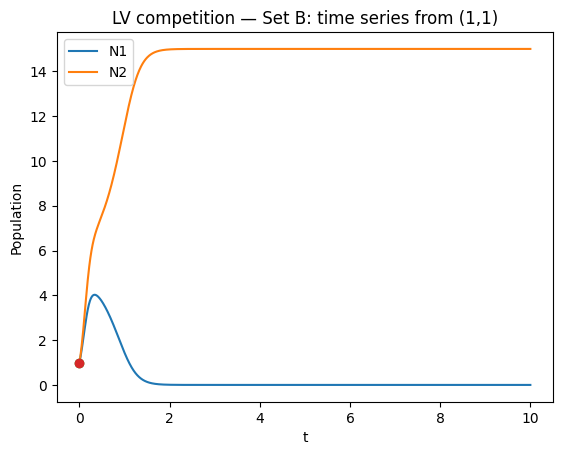
Now repeat the exercise for the parameters \(k_1=12\), \(k_2=15\), \(\alpha=1.2\), \(\beta=1.8\), \(r_1=1\), \(r_2=1\).
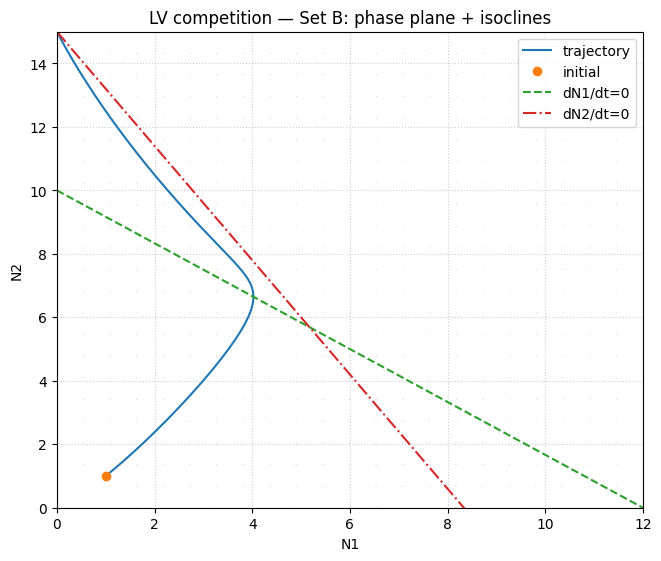
As an indication choose your \(N_1\) axis from \(0\) to \(12\) and the \(N_2\) axis from \(0\) to \(15\). Don’t forget to plot the appropriate isoclines.
Compare the two phase portraits. How are they different?
Optional tool: https://phaseportrait.github.io/installation/
# Parameters: set A
r1 = r2 = 1.0
k1, k2 = 10.0, 7.5
a, b = 1.0, 0.4
# Integrate
y0 = [1.0, 1.0]
t_span = (0.0, 10.0)
t_eval = np.linspace(*t_span, 1200)
solA = solve_ivp(lv_rhs, t_span, y0, t_eval=t_eval, args=(r1, r2, k1, k2, a, b),
rtol=1e-9, atol=1e-12)
N1, N2 = solA.y
plt.figure()
plt.plot(solA.t, N1, label="N1")
plt.plot(solA.t, N2, label="N2")
plt.plot([0],[y0[0]], marker="o", linestyle="none")
plt.plot([0],[y0[1]], marker="o", linestyle="none")
plt.xlabel("t"); plt.ylabel("Population")
plt.title("LV competition — Set A: time series from (1,1)")
plt.legend()
plt.show()
# Phase plane trajectory + isoclines
n1_grid = np.linspace(0, 20, 500)
iso1, iso2 = isoclines(n1_grid, k1, k2, a, b)
fig, ax = plt.subplots(figsize=(6.5, 5.5), constrained_layout=True)
add_vector_field(ax, lv_rhs, (0, 20), (0, 12), args=(r1, r2, k1, k2, a, b), density=23)
ax.plot(N1, N2, label="trajectory")
ax.plot([y0[0]], [y0[1]], marker="o", linestyle="none", label="initial")
ax.plot(n1_grid, iso1, "--", label="dN1/dt=0")
ax.plot(n1_grid, iso2, "-.", label="dN2/dt=0")
ax.set_xlim(0, 20)
ax.set_ylim(0, 12)
ax.set_xlabel("N1")
ax.set_ylabel("N2")
ax.set_title("LV competition — Set A: phase plane + isoclines")
ax.legend()
ax.grid(True, linestyle=':', alpha=0.6)
plt.show()
# Phase portrait: multiple initial conditions + isoclines
initial_conditions = []
for x in [0.5, 2, 6, 12, 18]:
for y in [0.5, 2, 5, 9, 11]:
initial_conditions.append([x, y])
fig, ax = plt.subplots(figsize=(6.5, 5.5), constrained_layout=True)
add_vector_field(ax, lv_rhs, (0, 20), (0, 12), args=(r1, r2, k1, k2, a, b), density=23)
for y0_ in initial_conditions:
sol = solve_ivp(
lv_rhs,
(0, 10),
y0_,
t_eval=np.linspace(0, 10, 400),
args=(r1, r2, k1, k2, a, b),
rtol=1e-8,
atol=1e-10,
)
ax.plot(sol.y[0], sol.y[1], linewidth=0.8)
ax.plot([y0_[0]], [y0_[1]], marker="o", markersize=2, linestyle="none")
ax.plot(n1_grid, iso1, "--", linewidth=1.5, label="dN1/dt=0")
ax.plot(n1_grid, iso2, "-.", linewidth=1.5, label="dN2/dt=0")
ax.set_xlim(0, 20)
ax.set_ylim(0, 12)
ax.set_xlabel("N1")
ax.set_ylabel("N2")
ax.set_title("LV competition — Set A: phase portrait + isoclines")
ax.grid(True, linestyle=':', alpha=0.6)
ax.legend(fontsize=8)
plt.show()
Equilibria & stability (Set A)#
We list the four candidate equilibria and classify:
feasible if \(N_1^*,N_2^*\ge 0\)
stable if Jacobian eigenvalues have negative real parts
Note
See also (theory notebook: competitive-dynamics.ipynb):
Equilibria and local stability → Equilibria
Equilibria and local stability → Jacobian and eigenvalues
E_A = equilibria(k1, k2, a, b)
for lab, eq in zip(["E00","E10","E01","Eco"], E_A):
ev, st, feas = stability_at(eq, r1, r2, k1, k2, a, b)
print(f"{lab} = {eq} | feasible={feas} | stable={st} | eigenvalues={ev}")
E00 = (0.0, 0.0) | feasible=True | stable=False | eigenvalues=[10. 7.5]
E10 = (10.0, 0.0) | feasible=True | stable=False | eigenvalues=[-10. 3.5]
E01 = (0.0, 7.5) | feasible=True | stable=False | eigenvalues=[-7.5 2.5]
Eco = (4.166666666666667, 5.833333333333334) | feasible=True | stable=True | eigenvalues=[-1.77251388 -8.22748612]
Parameter set B (alternative stable states case)#
Repeat (2‑1) for:
\(k_1=12\), \(k_2=15\)
\(\alpha=1.2\), \(\beta=1.8\)
\(r_1=r_2=1\)
With the practical’s suggested axes:
\(N_1\in[0,12]\), \(N_2\in[0,15]\)
Note
See also (theory notebook: competitive-dynamics.ipynb):
Bifurcations, catastrophic shifts, and hysteresis → LV bistability as a threshold phenomenon
# Parameters: set B
r1 = r2 = 1.0
k1b, k2b = 12.0, 15.0
ab, bb = 1.2, 1.8
y0 = [1.0, 1.0]
t_span = (0.0, 10.0)
t_eval = np.linspace(*t_span, 1200)
solB = solve_ivp(lv_rhs, t_span, y0, t_eval=t_eval, args=(r1, r2, k1b, k2b, ab, bb),
rtol=1e-9, atol=1e-12)
N1b, N2b = solB.y
plt.figure()
plt.plot(solB.t, N1b, label="N1")
plt.plot(solB.t, N2b, label="N2")
plt.plot([0],[y0[0]], marker="o", linestyle="none")
plt.plot([0],[y0[1]], marker="o", linestyle="none")
plt.xlabel("t"); plt.ylabel("Population")
plt.title("LV competition — Set B: time series from (1,1)")
plt.legend()
plt.show()
# Phase plane + isoclines (Set B)
n1_grid_b = np.linspace(0, 12, 500)
iso1b, iso2b = isoclines(n1_grid_b, k1b, k2b, ab, bb)
fig, ax = plt.subplots(figsize=(6.5, 5.5), constrained_layout=True)
add_vector_field(ax, lv_rhs, (0, 12), (0, 15), args=(r1, r2, k1b, k2b, ab, bb), density=23)
ax.plot(N1b, N2b, label="trajectory")
ax.plot([y0[0]], [y0[1]], marker="o", linestyle="none", label="initial")
ax.plot(n1_grid_b, iso1b, "--", label="dN1/dt=0")
ax.plot(n1_grid_b, iso2b, "-.", label="dN2/dt=0")
ax.set_xlim(0, 12)
ax.set_ylim(0, 15)
ax.set_xlabel("N1")
ax.set_ylabel("N2")
ax.set_title("LV competition — Set B: phase plane + isoclines")
ax.legend()
ax.grid(True, linestyle=':', alpha=0.6)
plt.show()
# Phase portrait (Set B)
initial_conditionsB = []
for x in [0.5, 2, 6, 10, 11.5]:
for y in [0.5, 3, 7, 12, 14.5]:
initial_conditionsB.append([x, y])
fig, ax = plt.subplots(figsize=(6.5, 5.5), constrained_layout=True)
add_vector_field(ax, lv_rhs, (0, 12), (0, 15), args=(r1, r2, k1b, k2b, ab, bb), density=23)
for y0_ in initial_conditionsB:
sol = solve_ivp(
lv_rhs,
(0, 10),
y0_,
t_eval=np.linspace(0, 10, 400),
args=(r1, r2, k1b, k2b, ab, bb),
rtol=1e-8,
atol=1e-10,
)
ax.plot(sol.y[0], sol.y[1], linewidth=0.8)
ax.plot([y0_[0]], [y0_[1]], marker="o", markersize=2, linestyle="none")
ax.plot(n1_grid_b, iso1b, "--", linewidth=1.5, label="dN1/dt=0")
ax.plot(n1_grid_b, iso2b, "-.", linewidth=1.5, label="dN2/dt=0")
ax.set_xlim(0, 12)
ax.set_ylim(0, 15)
ax.set_xlabel("N1")
ax.set_ylabel("N2")
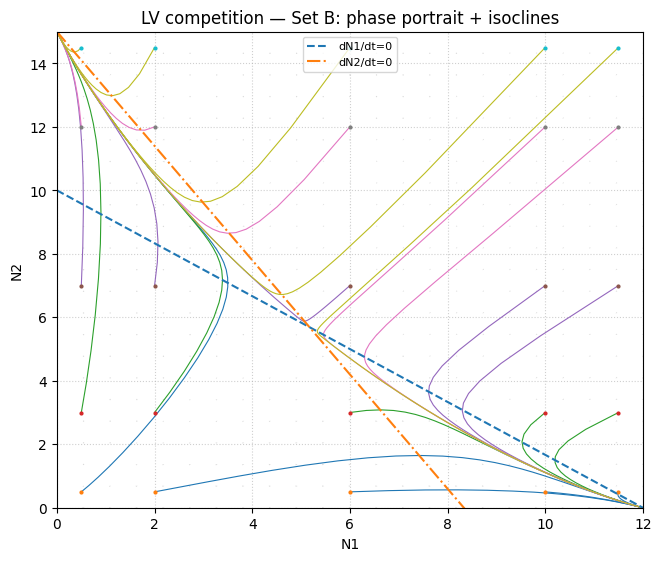
ax.set_title("LV competition — Set B: phase portrait + isoclines")
ax.grid(True, linestyle=':', alpha=0.6)
ax.legend(fontsize=8)
plt.show()
Equilibria & stability (Set B)#
E_B = equilibria(k1b, k2b, ab, bb)
for lab, eq in zip(["E00","E10","E01","Eco"], E_B):
ev, st, feas = stability_at(eq, r1, r2, k1b, k2b, ab, bb)
print(f"{lab} = {eq} | feasible={feas} | stable={st} | eigenvalues={ev}")
E00 = (0.0, 0.0) | feasible=True | stable=False | eigenvalues=[12. 15.]
E10 = (12.0, 0.0) | feasible=True | stable=True | eigenvalues=[-12. -6.6]
E01 = (0.0, 15.0) | feasible=True | stable=True | eigenvalues=[-15. -6.]
Eco = (5.1724137931034475, 5.689655172413794) | feasible=True | stable=False | eigenvalues=[ 2.54606189 -13.40813086]
Compare Set A vs Set B (qualitative)#
Set A typically yields a feasible, stable coexistence equilibrium \((N_1^*,N_2^*)\).
Set B typically yields bistability: both single‑species equilibria \((k_1,0)\) and \((0,k_2)\) can be stable, separated by an interior saddle.
(2‑2) Make a 1‑parameter bifurcation diagram of the Lotka–Volterra competition model#
Note
What are AUTO/XPP?
XPP (often “XPPAut”) is a small interactive program for simulating ODE models and exploring their dynamics.
AUTO is a numerical continuation package (often used via XPP) that can continue equilibria/limit cycles as a parameter changes and automatically label branches as stable vs unstable.
In a 2D system, “finding unstable equilibria by simulation” is not straightforward. In AUTO/XPP you can continue equilibria and label stable/unstable branches; here we exploit that the LV equilibria are explicit and classify stability using the Jacobian.
Note
See also (theory notebook: competitive-dynamics.ipynb):
Equilibria and local stability
Bifurcations, catastrophic shifts, and hysteresis
Original practical instruction (XPP/AUTO route): use the files
content/lectures/ecolmod_vj/code/lvcomp1.odecontent/lectures/ecolmod_vj/code/lvcomp2.ode
to draw a bifurcation diagram to plot \(N_2\) vs \(k_1\). Plot the same diagram for \(N_2\) vs \(k_2\).
When you look at the bifurcation diagram, you see many equilibrium lines (some stable, some unstable). Not all of these correspond to biologically feasible equilibria.
To get some feeling for what the lines mean, plot them as functions of \(N_1\) and as functions of \(N_2\) (in AUTO: Axes → hi‑lo and change the Y‑axis). For some equilibria you will see that either \(N_1=0\), or \(N_2=0\), or that one variable takes negative values.
(If you prefer, you can treat this part as an extension—your Python plots below reproduce the same ideas without needing continuation software.)
def branches_vs_k1(k1_values, k2, a, b, r1=1.0, r2=1.0):
out = {"E00": [], "E10": [], "E01": [], "Eco": []}
for k1 in k1_values:
E = equilibria(k1, k2, a, b)
labels = ["E00","E10","E01","Eco"]
for lab, eq in zip(labels, E):
n1, n2 = eq
ev, st, feas = stability_at(eq, r1, r2, k1, k2, a, b)
out[lab].append((n1, n2, st, feas))
for lab in out:
out[lab] = np.array(out[lab], dtype=object)
return out
def plot_bifurcation_k1(title, k2, a, b, k1_min=0, k1_max=25, r1=1.0, r2=1.0):
k1_values = np.linspace(k1_min, k1_max, 900)
br = branches_vs_k1(k1_values, k2, a, b, r1=r1, r2=r2)
plt.figure()
for lab, arr in br.items():
n2 = np.array([x[1] for x in arr], dtype=float)
stable = np.array([x[2] for x in arr], dtype=bool)
feas = np.array([x[3] for x in arr], dtype=bool)
plt.plot(k1_values[feas & stable], n2[feas & stable], linewidth=2, label=f"{lab} stable")
plt.plot(k1_values[feas & ~stable], n2[feas & ~stable], linewidth=2, linestyle="--", label=f"{lab} unstable")
plt.plot(k1_values[~feas], n2[~feas], linewidth=1, linestyle=":", alpha=0.35)
plt.xlabel("k1")
plt.ylabel("Equilibrium N2*")
plt.title(title)
plt.ylim(-5, max(25, k2+5))
plt.legend(ncol=2, fontsize=8)
plt.show()
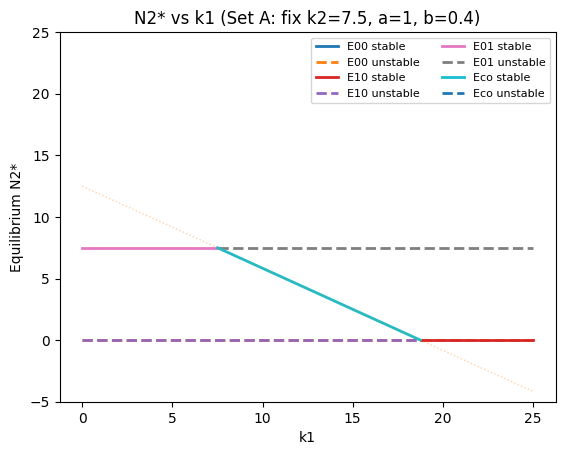
plot_bifurcation_k1("N2* vs k1 (Set A: fix k2=7.5, a=1, b=0.4)", k2=7.5, a=1.0, b=0.4, k1_min=0, k1_max=25)
def branches_vs_k2(k2_values, k1, a, b, r1=1.0, r2=1.0):
out = {"E00": [], "E10": [], "E01": [], "Eco": []}
for k2 in k2_values:
E = equilibria(k1, k2, a, b)
labels = ["E00","E10","E01","Eco"]
for lab, eq in zip(labels, E):
n1, n2 = eq
ev, st, feas = stability_at(eq, r1, r2, k1, k2, a, b)
out[lab].append((n1, n2, st, feas))
for lab in out:
out[lab] = np.array(out[lab], dtype=object)
return out
def plot_bifurcation_k2(title, k1, a, b, k2_min=0, k2_max=25, r1=1.0, r2=1.0):
k2_values = np.linspace(k2_min, k2_max, 900)
br = branches_vs_k2(k2_values, k1, a, b, r1=r1, r2=r2)
plt.figure()
for lab, arr in br.items():
n2 = np.array([x[1] for x in arr], dtype=float)
stable = np.array([x[2] for x in arr], dtype=bool)
feas = np.array([x[3] for x in arr], dtype=bool)
plt.plot(k2_values[feas & stable], n2[feas & stable], linewidth=2, label=f"{lab} stable")
plt.plot(k2_values[feas & ~stable], n2[feas & ~stable], linewidth=2, linestyle="--", label=f"{lab} unstable")
plt.plot(k2_values[~feas], n2[~feas], linewidth=1, linestyle=":", alpha=0.35)
plt.xlabel("k2")
plt.ylabel("Equilibrium N2*")
plt.title(title)
plt.ylim(-5, max(25, k1+5))
plt.legend(ncol=2, fontsize=8)
plt.show()
plot_bifurcation_k2("N2* vs k2 (Set A: fix k1=10, a=1, b=0.4)", k1=10.0, a=1.0, b=0.4, k2_min=0, k2_max=25)
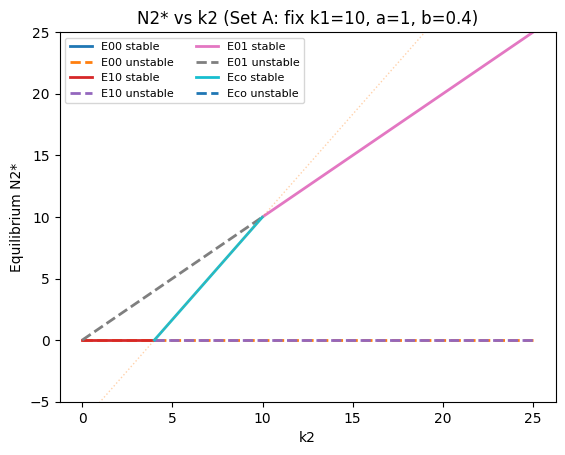
What the branches mean#
When you see multiple equilibrium “lines” in a bifurcation plot:
E10: \(N_2^*=0\), \(N_1^*=k_1\) (species 1 only)
E01: \(N_1^*=0\), \(N_2^*=k_2\) (species 2 only)
Eco: coexistence intersection (may be stable or unstable; may become infeasible)
portions where \(N_1^*<0\) or \(N_2^*<0\) are not biologically feasible (these are the faint dotted parts)
Note
See also (theory notebook: competitive-dynamics.ipynb):
Equilibria and local stability → Equilibria
Equilibria and local stability → Jacobian and eigenvalues
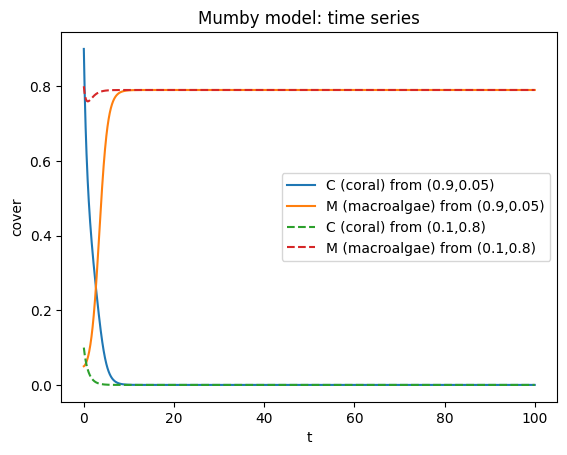
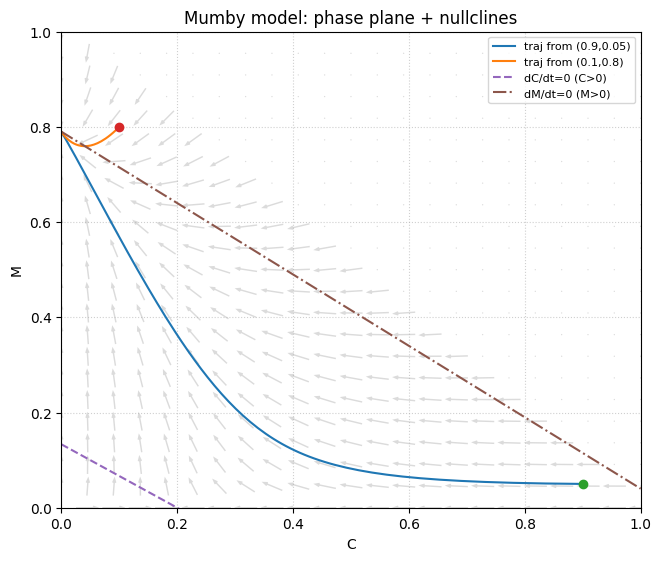
(2‑3) Mumby et al. coral–macroalgae model: phase portrait#
The model of Mumby et al. ([Mumby et al., 2007]) describes the dynamics of corals and algae. The model in the practical is: $\( \begin{aligned} \dot C &= \gamma C T - aMC - dC,\\ \dot M &= rMT + aMC - gM,\\ T &= 1 - M - C. \end{aligned} \)$
Investigate the dynamics in the phase plane as explained in the previous exercise. Use parameters:
\(g=0.42\), \(r=2\), \(\gamma=1\), \(a=0.5\), \(d=0.8\)
We reproduce phase‑plane plots analogous to (2‑1), but now variables are fractions of space.
Note
See also (phase‑plane technique, theory notebook: competitive-dynamics.ipynb):
Lotka–Volterra Competition: geometry in the phase plane
def mumby_rhs(t, y, g=0.42, r=2.0, gamma=1.0, a=0.5, d=0.8):
C, M = y
T = 1 - C - M
dC = gamma*C*T - a*M*C - d*C
dM = r*M*T + a*M*C - g*M
return [dC, dM]
# simulate two initial conditions
t_span = (0, 100)
t_eval = np.linspace(0, 100, 2001)
sol1 = solve_ivp(mumby_rhs, t_span, [0.9, 0.05], t_eval=t_eval, rtol=1e-9, atol=1e-12)
sol2 = solve_ivp(mumby_rhs, t_span, [0.1, 0.8], t_eval=t_eval, rtol=1e-9, atol=1e-12)
C1, M1 = sol1.y
C2, M2 = sol2.y
plt.figure()
plt.plot(sol1.t, C1, label="C (coral) from (0.9,0.05)")
plt.plot(sol1.t, M1, label="M (macroalgae) from (0.9,0.05)")
plt.plot(sol2.t, C2, "--", label="C (coral) from (0.1,0.8)")
plt.plot(sol2.t, M2, "--", label="M (macroalgae) from (0.1,0.8)")
plt.xlabel("t"); plt.ylabel("cover")
plt.title("Mumby model: time series")
plt.legend()
plt.show()
# Phase plane + nullclines
# We'll plot trajectories and add the analytical nullclines derived from dividing by C or M:
# dC/dt=0 for C>0: gamma(1-C-M) - aM - d = 0
# dM/dt=0 for M>0: r(1-C-M) + aC - g = 0
g=0.42; r=2.0; gamma=1.0; a_m=0.5; d=0.8
C_grid = np.linspace(0, 1, 600)
# From gamma(1-C-M) - aM - d = 0 -> gamma(1-C-M) = d + aM
# -> gamma - gamma*C - gamma*M = d + aM -> (gamma + a)M = gamma - d - gamma*C
M_nullC = (gamma - d - gamma*C_grid)/(gamma + a_m)
# From r(1-C-M)+aC-g=0 -> r - rC - rM + aC - g = 0 -> rM = r - g + (a-r)C
M_nullM = (r - g + (a_m - r)*C_grid)/r
fig, ax = plt.subplots(figsize=(6.5, 5.5), constrained_layout=True)
# Add vector field in the feasible simplex C>=0, M>=0, C+M<=1
add_vector_field(
ax,
mumby_rhs,
(0, 1),
(0, 1),
args=(g, r, gamma, a_m, d),
density=23,
mask_fn=lambda C, M: (C + M) <= 1.0,
)
ax.plot(C1, M1, label="traj from (0.9,0.05)")
ax.plot(C2, M2, label="traj from (0.1,0.8)")
ax.plot([0.9],[0.05], marker="o", linestyle="none")
ax.plot([0.1],[0.8], marker="o", linestyle="none")
ax.plot(C_grid, M_nullC, "--", label="dC/dt=0 (C>0)")
ax.plot(C_grid, M_nullM, "-.", label="dM/dt=0 (M>0)")
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.set_xlabel("C")
ax.set_ylabel("M")
ax.set_title("Mumby model: phase plane + nullclines")
ax.grid(True, linestyle=':', alpha=0.6)
ax.legend(fontsize=8)
plt.show()
(2‑3 cont.) An analysis of the codim‑2 cusp bifurcation (minimal hysteresis model)#
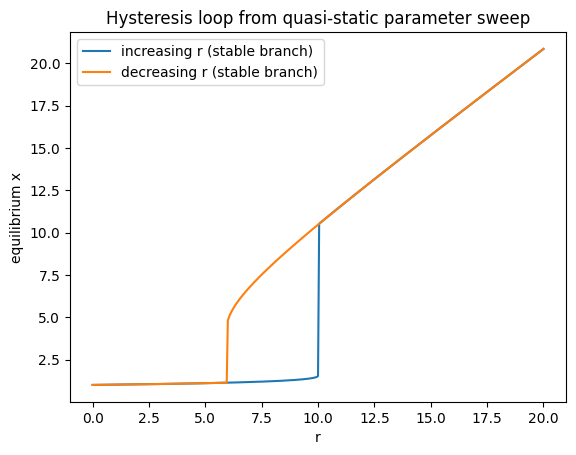
In [Scheffer et al., 2001] a minimal model for an ecosystem with hysteresis is given. The variable \(x\) is a property (for instance a nutrient) of the ecosystem, and changes over time as $\( \frac{dx}{dt} = a - bx + r f(x). \)$
The parameter \(a\) represents an environmental factor that promotes \(x\), \(b\) is the rate at which \(x\) decays in the system, and \(r f(x)\) is a positive feedback term whose strength is controlled by \(r\). The function \(f\) is given by the Hill function $\( f(x) = \frac{x^p}{x^p+h^p}. \)$
Make a bifurcation diagram as in the previous exercise. As initial parameters use \(r=0\), \(h=4\), \(p=3\), \(a=1\), \(b=1\).
Choose an appropriate starting value for \(x\) (try \(x(0)=0\)) and make the bifurcation diagram by increasing \(r\) from \(0\) to \(20\). Save and plot.
Then do it again, now starting at \(r=20\) (and try \(x(0)=20\)) and decrease the value of \(r\) from \(20\) to \(0\). What do you see? What happens in the middle? Is the bifurcation diagram complete? Can you find the missing branch?
Note
See also (theory notebook: competitive-dynamics.ipynb):
A minimal hysteresis model (positive feedback)
Notes on the “missing branch”
def hill(x, h=4.0, p=3.0):
return x**p/(x**p + h**p)
def hyster_rhs(t, x, a=1.0, b=1.0, r=0.0, h=4.0, p=3.0):
return a - b*x + r*hill(x, h=h, p=p)
def relax_equilibrium(r, x0, a=1.0, b=1.0, h=4.0, p=3.0):
sol = solve_ivp(lambda t, x: hyster_rhs(t, x, a=a, b=b, r=r, h=h, p=p),
(0, 200), [x0], t_eval=np.linspace(0,200,2000),
rtol=1e-9, atol=1e-12)
return sol.y[0, -1]
a0=1; b0=1; h0=4; p0=3
rs_up = np.linspace(0, 20, 401)
rs_dn = np.linspace(20, 0, 401)
x_up=[]
x=0.0
for r in rs_up:
x = relax_equilibrium(r, x, a=a0,b=b0,h=h0,p=p0)
x_up.append(x)
x_dn=[]
x = x_up[-1]
for r in rs_dn:
x = relax_equilibrium(r, x, a=a0,b=b0,h=h0,p=p0)
x_dn.append(x)
plt.figure()
plt.plot(rs_up, x_up, label="increasing r (stable branch)")
plt.plot(rs_dn, x_dn, label="decreasing r (stable branch)")
plt.xlabel("r"); plt.ylabel("equilibrium x")
plt.title("Hysteresis loop from quasi‑static parameter sweep")
plt.legend()
plt.show()